足の制作、クリスマスに間に合うのか!?
今回は足の組み立てです。

お気付きかもしれませんが今回のロボは緑と赤のクリスマスカラーになっています。
なので25日までには完成させたいのですが、結構ギリギリになりそうです。
元々クリスマスカラーにするつもりはなかったので、年内に完成すればいいかと考えてました。
作業を怠けなければいけそうですが問題は寒さですね。
こたつから出て作業するのに気合が必要です。
ということでがんばって足を組んでいきます。
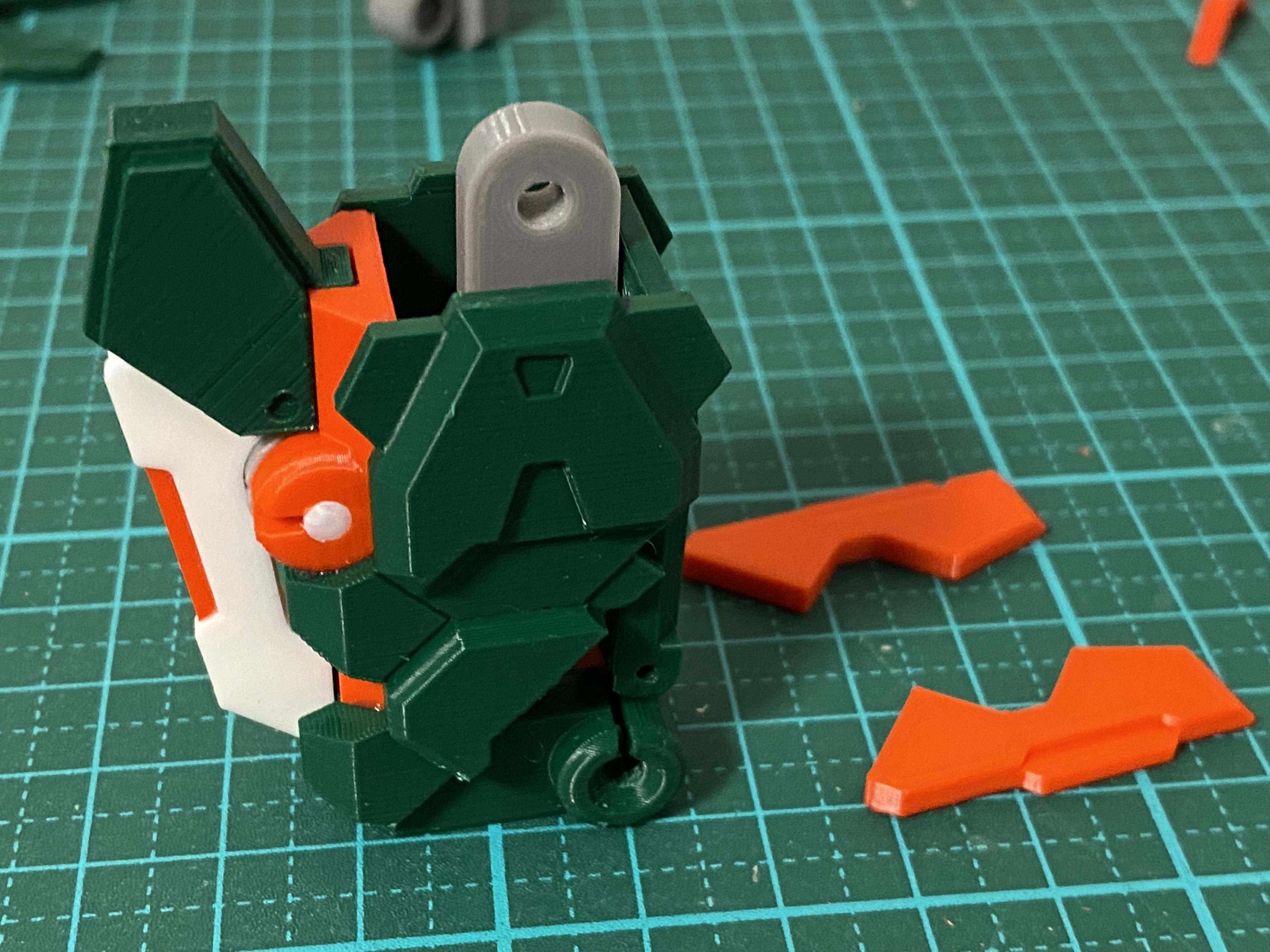
プリントしたパーツです。片足分です。



変形時につま先を折りたたみます。
つま先とかかとは左右に角度を変えられます。

パーツを組み立てます。



足先と接続します。

可動するパーツを組み立てます。





軸には3mmのプラ棒を使います。

足の変形の要です。

足裏の蓋パーツです。


1.5mmの金属棒を軸に接続します。

すねのパーツに軸で接続します。

2重関節で可動します。

パーツを接続します。

左右に赤いパーツを接着します。





プリントしやすいように分割してあります。

組み立てます。

スネと足首を接続します。










うまく出来たと思います。満足です。

後は胴体とハネを組んで完成となります。
胴体のモデリング調整がまだなので、ちょっと頑張って進めていきます。
今回はここまでです。
コメント
0 件のコメント :
コメントを投稿