完成!!獣型01爆誕。
今回は足と尻尾を組み立てて完成させます。

いよいよ大詰めです。
残りのパーツを組み立てて、狙った通りに可動するか確かめます。
ではまず足の組み立てから。
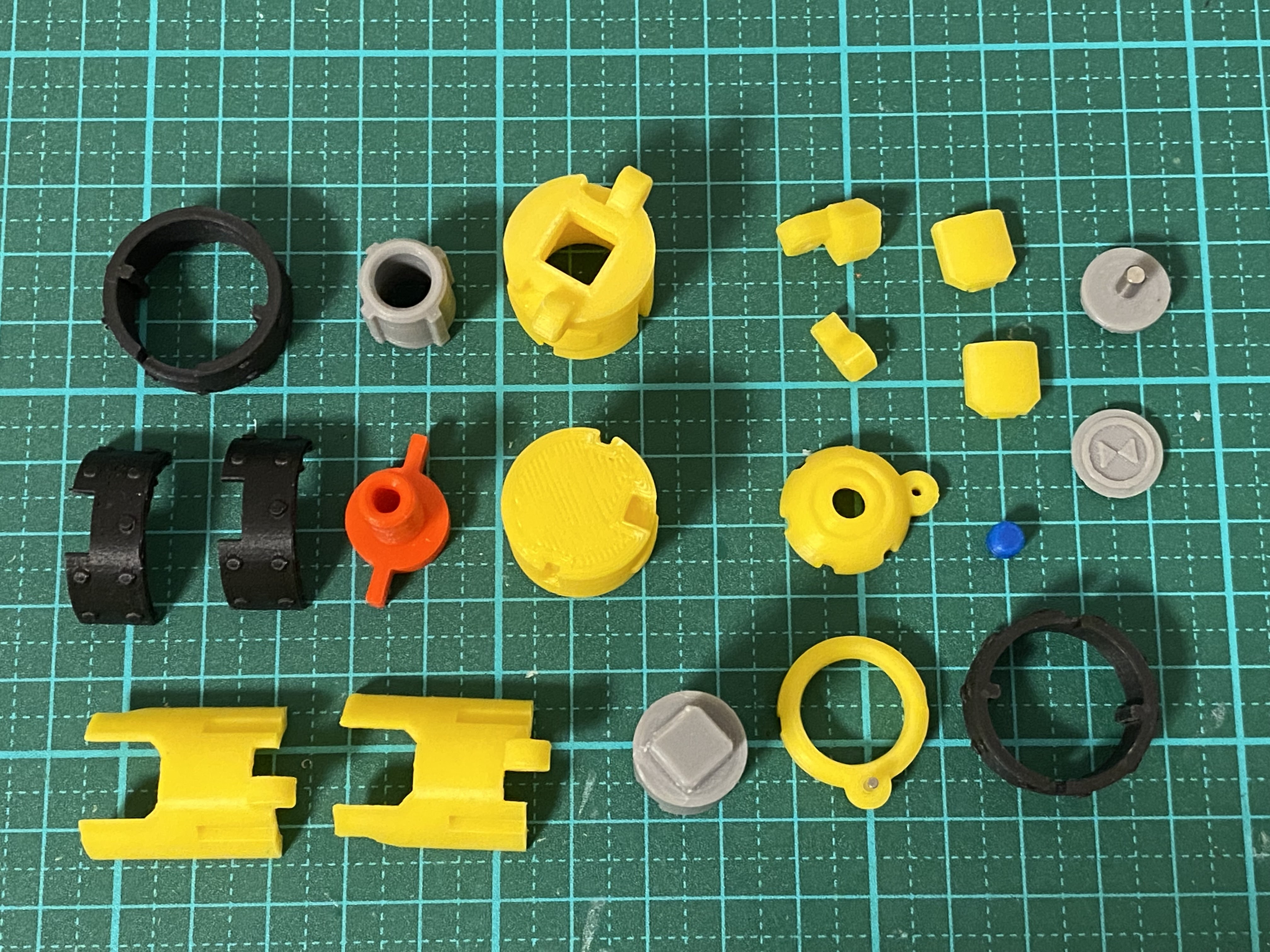
足のパーツです。





タイヤを接続します。


左右のタイヤパーツを接続します。


足先のパーツです。

プラ棒を軸にしてパーツを接続します。

パーツを接着します。






棒状のパーツは3mmのプラ棒です。

さっきのパーツをガイドにして接続します。


こぶしの穴にプラ棒を通します。


棒の先に赤いパーツを接続します。

胴体と足はこれで完成です。








続いて尻尾を組みます。













これですべてのパーツが完成しました。
ではロボと合体させてみます。

特に問題無く合体出来ました。
横から。

後ろから。

正面から。

分離、変形も試してみましたがこちらも問題無し。



ということで獣型01、完成です。ヤッター!!


最後に今回の感想を少し。
サイズを小さく設計したため組み立ては結構大変でした。
パーツが小さいのでプリントが早く済んだのは良かったです。
かなり小さいパーツがちゃんとプリント出来たのは驚きました。
デザイン的に面白く出来たと思います。
そのまま使っているパーツもありますが、テーマの『タイムボカンシリーズっぽいメカ』にはなっているんじゃないかと。
中のロボはタツノコっぽくないですけど。むしろ戦隊ロボのような。
ということで次回は完成披露します。
今回はここまでです。
コメント
0 件のコメント :
コメントを投稿