1体目完成、ニューアイテムで作業快調。
今回は2体合体ロボの1体目を完成させます。

本当は2体合体ではなく3体合体なんですがまあいいでしょう。
前回までのパーツと今回組み立てるパーツでとりあえず合体前のロボは完成します。
さらに同じものをもう1体作ると本当の完成です。
では組み立てていきます。

パーツを接着します。
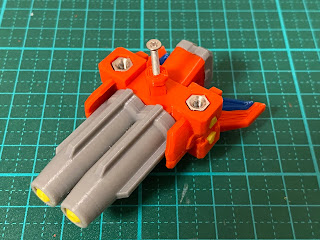
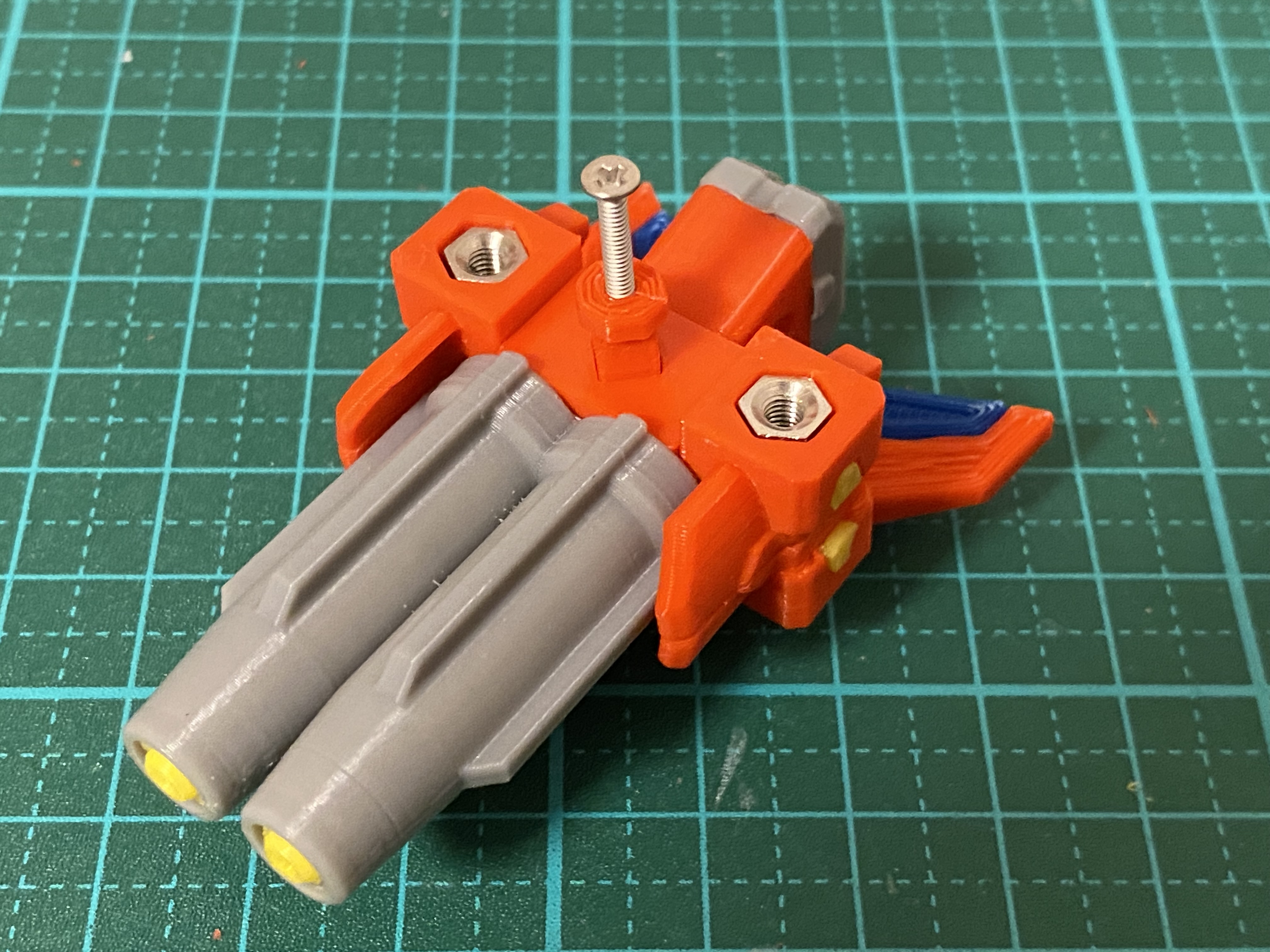
このパーツは合体時に武器になります。
両側からボルトを入れられます。

長さが丁度良かったので採用しました。

パーツではさんで接着します。

これらのパーツを組み立てます。


四角い穴にパーツを挿し込みます。


パーツを接続します。


磁石をはめます。

武器の持ち手になるボルトを接続します。










これで完成です。


前回の胴体に接続用の磁石パーツをはめます。


前々回の足パーツを少し変更します。
パーツを固定するボルトを変えました。
右が変更前のボルトです。いちいちドライバーが必要になるため面倒です。

そこでホームセンターで見つけたこのボルトを使用します。
ドライバーが要らず指で回せます。

電工ペンチを使用します。

ちょっと力が要りますが簡単にボルトをカットできます。

丁度いい長さになりました。


デザイン的にも面白い感じになったと思います。

今までのパーツを組み合わせて合体前のロボを組み立てます。

組み立て工程は完成後にまとめて紹介します。



可動は良好です。


このユルい感じが気に入ってます。
合体前と後のギャップが大きいほどワクワクしますよね。
ということであとはもう1体組み立てて完成です。
ここまでで問題点も改善してきたのでサクッと組んで完成といきたいです。
今回はここまでです。
コメント
0 件のコメント :
コメントを投稿