腕?足?どちらにもなるパーツの制作。
今回は足(腕)の制作です。

合体時に腕と足、どちらにもなります。
今回は足になるように組み立てていきます。
では始めます。
プリントしたパーツです。これで片足分です。


仕組みを簡単に説明します。

ボルトに球体のパーツを接続して軸にします。
固めの調整にしたいので接着ではなくネジでしっかり固定しました。

ボルトを動かしてみるといい感じの固さです。
両側からボルトで接続します。

前腕部のくぼみにナットをはめます。
ちなみにこの画像のパーツは試作用に作ったものです。

球体を上下のパーツではさみます。


うまくできたのでこの方式を採用していきます。

では組み立てていきます。

ボルトにパーツをはめていき、最後に球体のパーツを接続します。

球体を上下ではさみネジで固定します。

足裏のパーツです。接着します。



足首はこれで完成です。

すねのパーツを組み立てます。

足首と接続します。

裏面はありません。

ボルトを挿し込み固定します。

裏側にボルトがはみ出ています。






これらのパーツを組み合わせます。






これが他のパーツをはめるときのガイドになります。

次は腕を組み立てていきます。

この腕は足の内部パーツになります。

手首を接続します。

前回のロボでも使用した直径3mmの金属棒を軸にしています。

上腕パーツを接続します。

関節は両側からボルトではさんでいます。

横回転できるように軸でパーツを接続します。

肩パーツに接続します。




合体時にボルトを通してパーツを固定します。

パーツを接着して組み立てます。

これらのパーツを組み合わせて足にします。

組み立て手順は完成後に説明します。



足はこんな感じです。
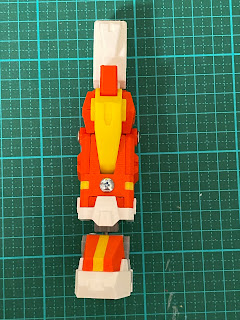

パーツ同士のジョイント部をボルトにしたおかげで、かなりしっかりとした足になりました。

可動部も調整ができるので自立は問題無さそうです。
足首のボールジョイントも問題無しです。
ということでもう片足もプリントして組み立てました。

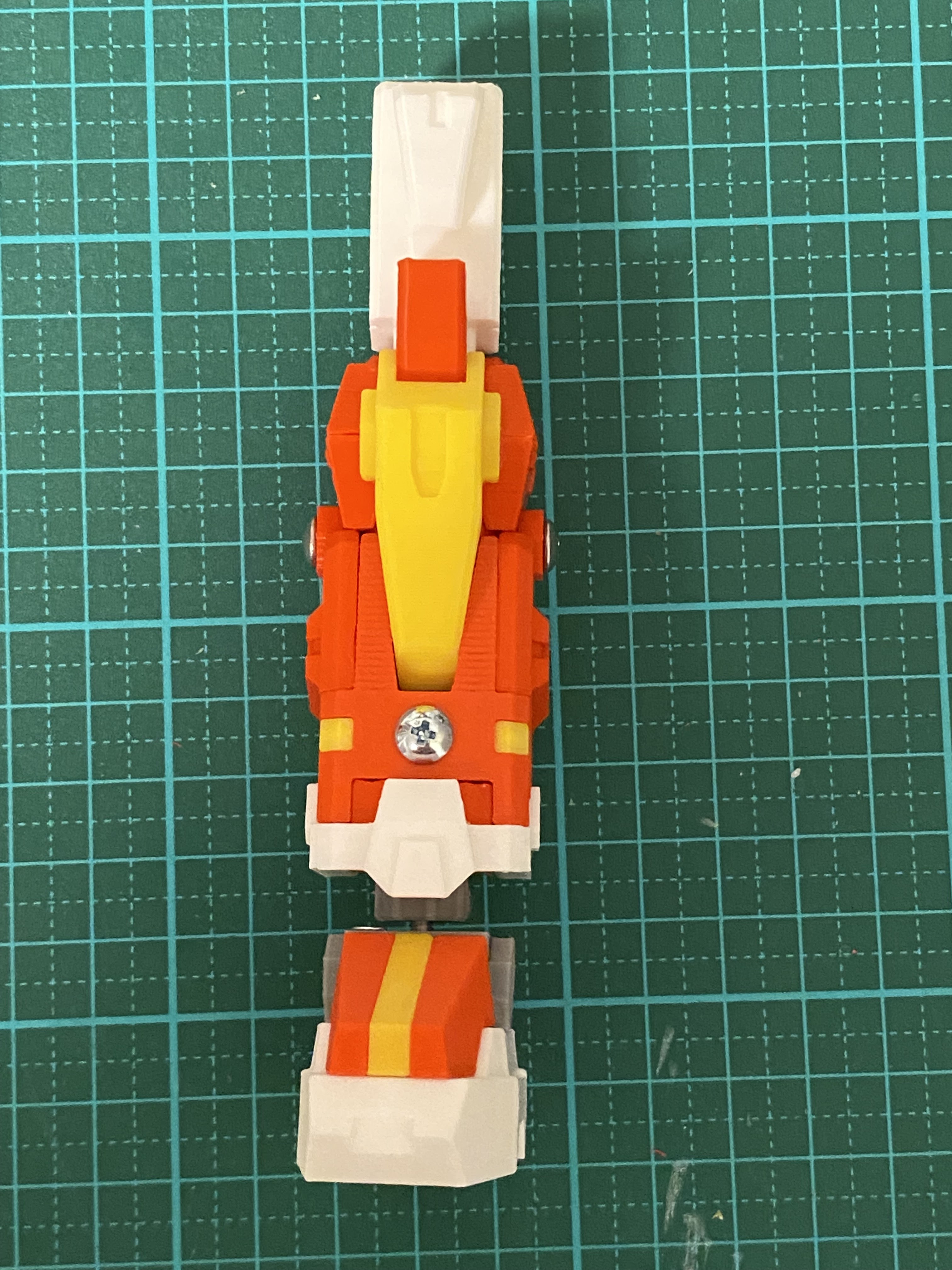
ネジ頭がちょっと目立ちますね。

でもこれはこれでメカっぽい感じがして良いですね。

後ろです。

関節はかなり自由に動きます。

ただ最終的に完成した時は股関節の動きが制限されると思います。
こんなポーズは無理っぽいです。


以上で足は完成です。
が、同じものを色違いであと2つ作ります。
作業工程は同じなので問題無くできると思います。
今回はここまでです。
コメント
0 件のコメント :
コメントを投稿