腕の制作、いい感じの関節。
今回は腕を組み立てます。

プリンターのトラブルがあったりして大変でしたが頑張って組んでいきます。
では始めます。
プリントしたパーツです。片腕分です。



その都度ネジを締めれば問題無いのですが、それは目指している理想の関節ではありません。
そこで私なりのやり方を紹介します。
使うものは瞬間接着剤です。粘度の高いゼリー状のものです。

関節パーツの接触する面に接着剤を薄く塗ります。

両方のパーツに行います。

すかさずプライマーを噴射します。

接着剤を固めるためというのもありますが、大事なのは白化を防ぐためです。
プライマーを吹かないと接着剤の周りが真っ白になってしまいます。

接着剤を塗った面同士を合わせて接続します。

これで丁度いい感じの引っ掛かりで関節が保持できます。

では続けて組んでいきます。

パーツを軸で接続します。
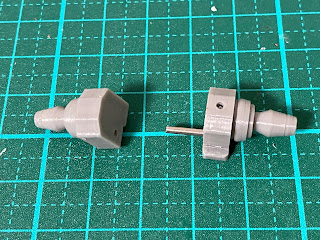
さらに軸を挿して肩パーツに接続します。

赤いパーツを接着します。

前後にパーツを接着します。


パーツを接着します。


肩と軸で接続します。

肩はこれで完成です。

上腕部と前腕部を組みます。

この関節も接着剤を塗っています。

正面と左右にパーツを接着します。


後ろ側にもパーツを接着します。


手首を組み立てます。

前腕部の先に軸を挿して接続します。


肩パーツと軸で接続します。

これで腕の完成です。

後ろから。

内側から。

外側から。

今回のロボは可動をテーマにしていますが、腕はいつも通り標準的な可動です。























ひじは90度まで曲がります。

問題無く出来たので反対の腕も組み立てました。



問題無く出来たので反対の腕も組み立てました。

手はハンドルを握れるような形にしています。
ですが手首は回転しかできないので、もしかしたらうまくハンドルを握れないかもしれません。
ちょっと不安ですね。

ということで次は足を組み立てたいのですが、まだ問題が解決していません。
とりあえず組んでから考えようと思います。作業を止めるのはいやなので。
今回はここまでです。
コメント
0 件のコメント :
コメントを投稿