ミニロボの制作、0.2mmノズルの実力とは!?
今回はミニロボを組み立てます。

前回の足(腕)以外のパーツを組み立ててミニロボを完成させます。
組み立ての前にちょっとお話を。
3Dプリンターのノズルを0.4mmから0.2mmに交換しました。
今まで0.5mm以下の細かな造形を再現するのに0.4mmノズルはちと辛かったです。
0.2mmに変えたところ劇的にとはいかないまでも、まあまあの品質になりました。
特にオーバーハングのプリントミスが減ったのが良かったです。
プリント時間は長くなりましたがミスプリントが減り、結果時間短縮になっています。
これからはこの0.2mmノズルでやっていこうと思います。
では組み立てていきます。
まずは頭部から。





軸はガイド用です。


こちらも同じく接着します。


このパーツを2個組み立てます。

左右に接続します。

頭部にボルトで接続します。

前面のアーマーと背中のランドセルになります。

合体時にはライフルになります。

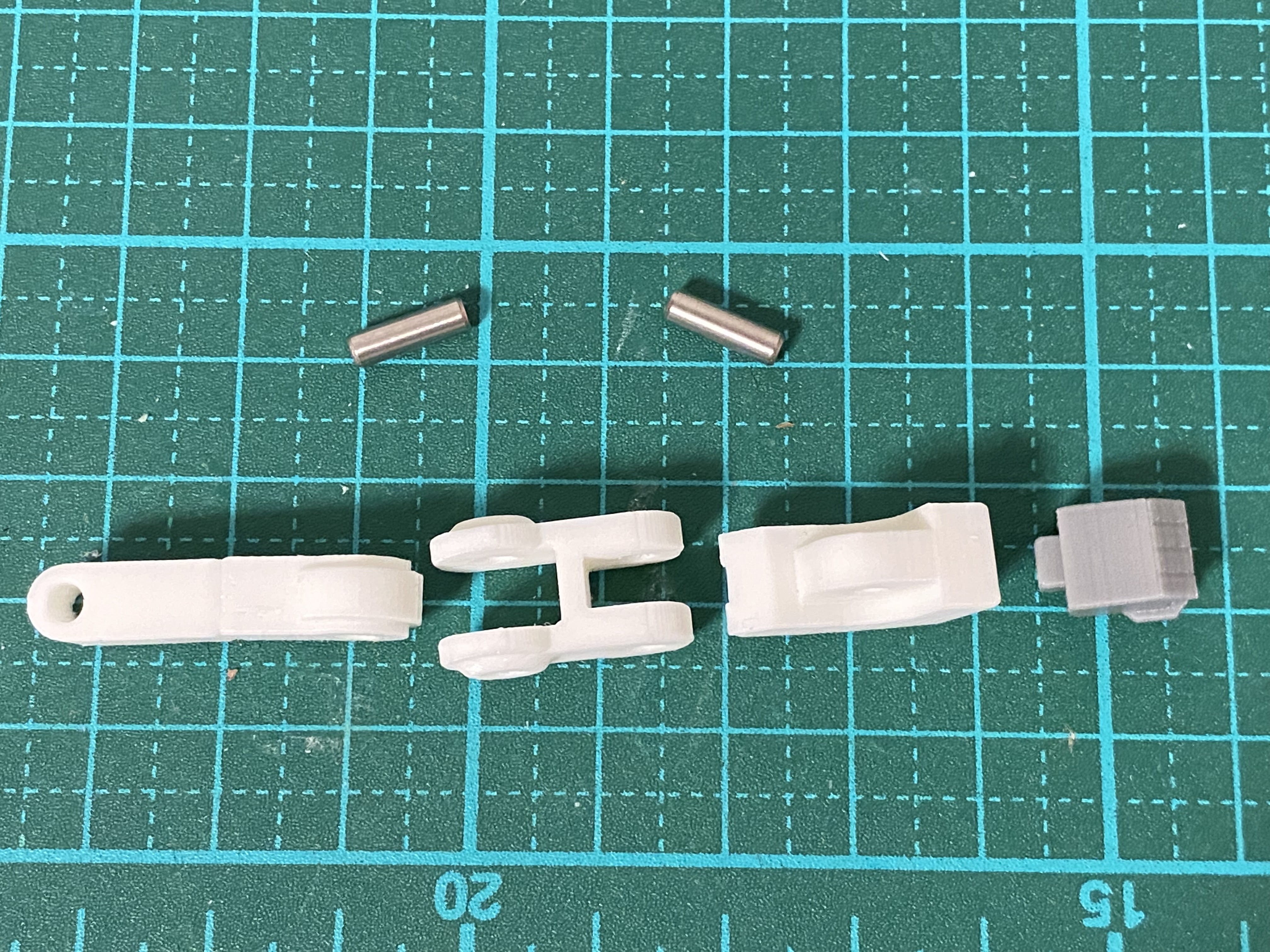
腕を組み立てます。

上腕部です。軸で接続します。

前腕部と軸で接続します。
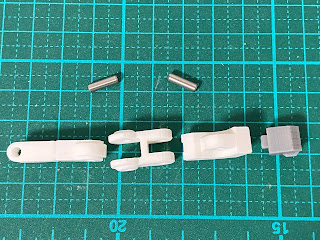
ひじの他にもう一つ可動軸があります。

肩のパーツです。

軸を入れて腕を接続します。

同じものをもう一つ組み立てて腕の完成です。

胴体を組み立てます。















パーツに軸を挿します。

胸部前面のパーツです。

合体時の接続用に磁石をはめ込みます。

軸をガイドにして前後に貼り合わせます。

腕をボルトで接続します。


前回の足を接続します。

上部に磁石をはめます。

頭部の下にも磁石をはめます。

磁石で接続します。

これで完成です。








合体型03、合体前のミニロボです。




腕と足の前後可動ができないです。首も回りません。




可動は割り切って設計しましたがちょっと残念ですね。
ポーズもこれぐらいで限界です。

頭部が余剰パーツにならないよう必死に考えました。

ということで無事にミニロボを完成させることが出来ました。

ここ最近では一番手がかかった感じがします。
プリントしてからモデリングを変更してまたプリントして変更してと、泥沼状態でした。
完成して今はホッとしています。
まだ真の完成まで半分以上作業が残っています。
ぼちぼちやっていこうと思います。失敗もまあ楽しいもんですよ。


今回はここまでです。
コメント
0 件のコメント :
コメントを投稿