足の制作、苦難の連続。
今回は足の制作です。

何かいろいろ大変でした。
前回ノズルを0.2mmに変更しましたがその結果がこれです。

ミスプリントの山です。時間もかなり無駄にしました。
ミスの原因は何となく分かったのですが、また失敗すると立ち直れないのでノズルを0.4mmに戻すことにしました。
で気を取り直してプリント再開したのですが、あるパーツが何回やってもうまくプリントできず作業が止まります。

上の画像の10個のパーツは全部失敗です。
さほどきつくないオーバーハングのプリントミスです。なぜか左右の片側だけ。
スライサーの設定を変えたり冷却強化のファンを増設したりしましたがダメでした。
訳が分からないのが最初の一個は成功しているというところです。
2個必要なのでもう一度プリントしたところこの有様ですよ。
結局完璧にはプリントできなかったので、失敗パーツの中からマシなのを選びました。
こんな感じで作業がサクサク進まないものですからテンションダダ下がりです。
プリンターさわるのが嫌になってしまいました。
でもこのままだとお蔵入りになりそうなので、今回に限りこだわりは捨ててひたすら完成を目指す事に決めました。
多少のミスや失敗は気にせず作業を進めていきます。
完成させることが大事だと。そんな感じです。
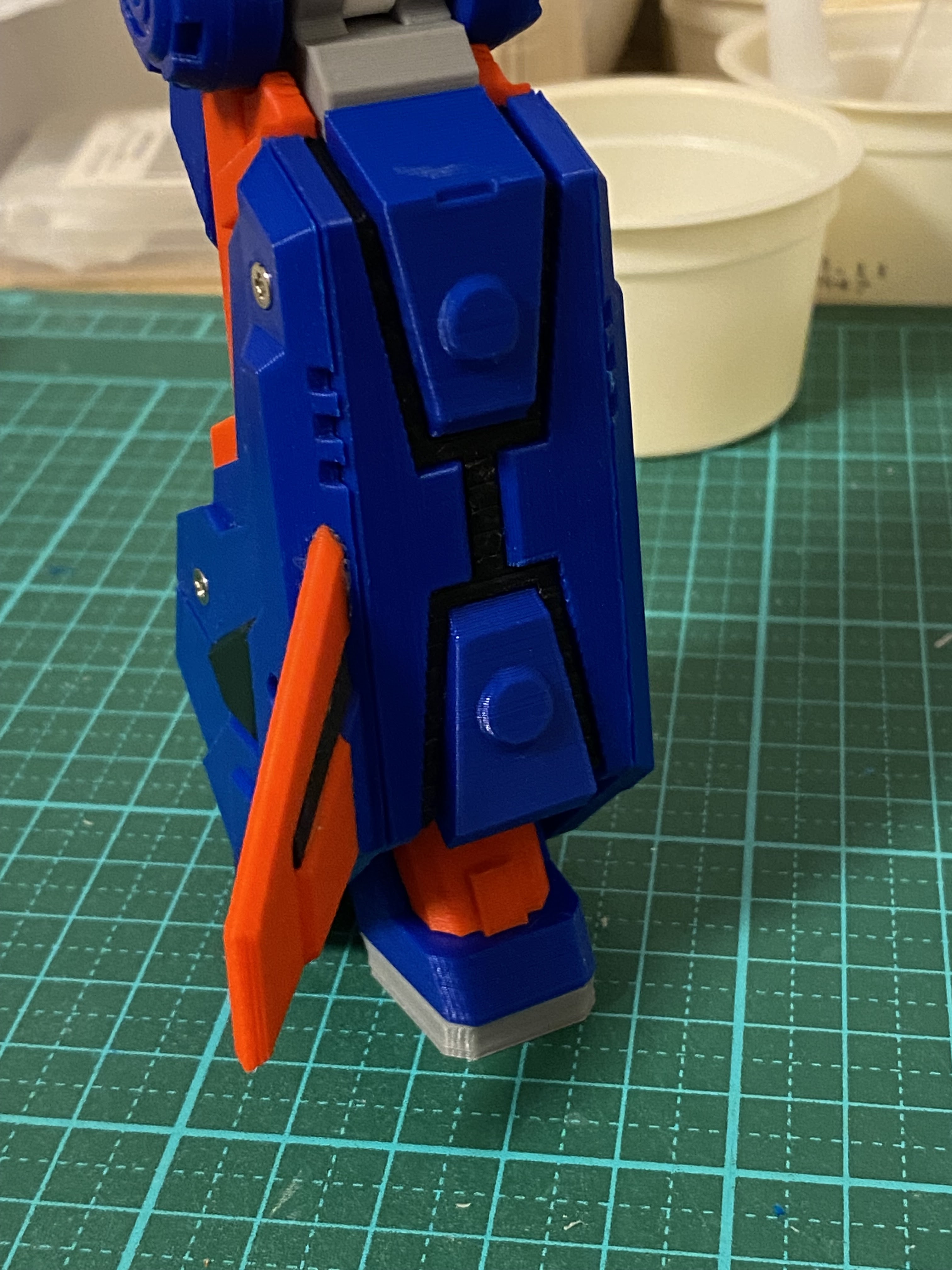
ということで足を組み立てていきます。
プリントしたパーツです。片足分です。


























太ももをひざ下に格納します。

前面のパーツを倒します。

ひざ下のパーツをたたんで太ももを下げます。

前面のパーツを戻します。



短くなりました。

もう片方の足も組み立てました。


何とか完成できました。足がですけど。



この足、実はモデリングもやり直しています。
10日もかかってしまいましたよ。トホホ。
前回のミニロボと並べるとこの大きさ・・・

完成したら過去最大になりそうです。
今回はここまでです。
コメント
0 件のコメント :
コメントを投稿