走行型02、大地に立つ?
完成に向けてラストスパートです。
まずはひざパーツのポロリを直します。

こんな感じですぐ外れてしまいます。
パーツを作り直しネジで固定できるようにします。

これで外れないようになりました。

次は頭部です。
前はアンテナがうまくプリントできなかったので、今回は別パーツにしてプリント後にくっつけました。

うまくできました。やっぱり複雑な形は分割するのが最適解ですね。

最後に残った片足をプリントして組み立てます。

両足ができました。これでプリントはすべて完了です。

まずは足を腰パーツに接続します。

いい感じではまったので接着はしませんでした。
ここで接着しなかったことがあとでラッキーになります。

両足くっつけます。

わかってはいましたが中々ごつい足です。
では次に腕を胴体に接続します。

腕は変形時、前方に移動します。
軸を入れて回転できるようにします。

両腕付けます。

次は背中のパーツを胴体に接着します。

ガイドを付けてなかったのでずれないように慎重に接着します。

上半身と下半身を接続します。

こっちは凸凹を付けてあるので気楽に接着します。

最後に頭部をつけます。
磁石をはめ込んであります。ヘッドン。
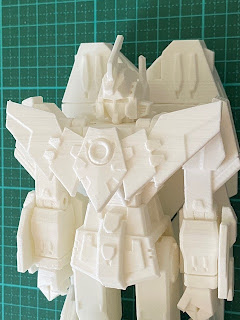
これで完成です。

ふむ・・・足がちょっと気になりますね。
外側にボリュームがあり、さらにつま先が外を向いてないので内股に見えます。
まあギリギリ許せる範囲です。
しかし許容できない問題があります。それは・・・
立てない!
自立できないロボっていったい・・・
背中側が重くなるのはわかっていました。
それでも立てるように設計したつもりでしたが、ひざが弱くて立てません。
ひざを固定すれば立てるので重心バランスは問題無いかと。
完成した喜びが台無しです。何とかしないといけません。
ももパーツを作り直します。ついでに内股も直します。
ひざの可動範囲を制限しました。
さらにパーツを分割して回転できるようにしました。

寸法に0.2mmの余裕をつけたのにギチギチでした。
おかげでぷらぷらにならず結果オーライです。

先ほど足を接着しなかったおかげで作業が楽にできました。
接着剤は便利ですが失敗したときの絶望感がヤバいです。今回は助かりました。
組み立てます。さて立ちますでしょうか・・・

立った!ロボが立ったよ!うわーん!
つま先が外を向いています。内股が直りました。
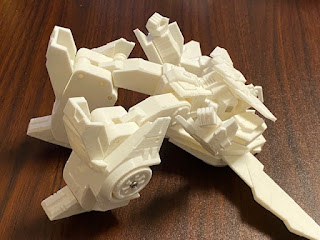
では変形させてみます。

うん、できてる。問題無し。オールOK!
これにて完成です。今度こそ本当に。うれしー。
今回のロボは開発から完成まで時間がかかりました。
プリンターのトラブルもありましたし。
何よりロボを車の形に持っていくのが難しかったです。
大変でしたが完成した喜びで帳消しです。
今日はぐっすり寝れそうです。
最後に廃棄するパーツをご覧下さい。

まあまあの数ですね。頭部7個・・・
次回は変形プロセスをお見せします。
今回はここまでです。
コメント
0 件のコメント :
コメントを投稿