最難関、胴体の制作。
今回は胴体を組み立てます。

この胴体は可動部が多く、設計に時間がかかりました。
接着して固定するので組み立ての順番を間違うとプリントからやり直しになります。
慎重に組んでいきます。
接着して固定するので組み立ての順番を間違うとプリントからやり直しになります。
慎重に組んでいきます。
パーツです。

分割したパーツを貼り合わせます。

腰を組みます。
変形の都合上、胴体は前後に分割してあります。
まずは腰の後ろ側から。
変形の都合上、胴体は前後に分割してあります。
まずは腰の後ろ側から。

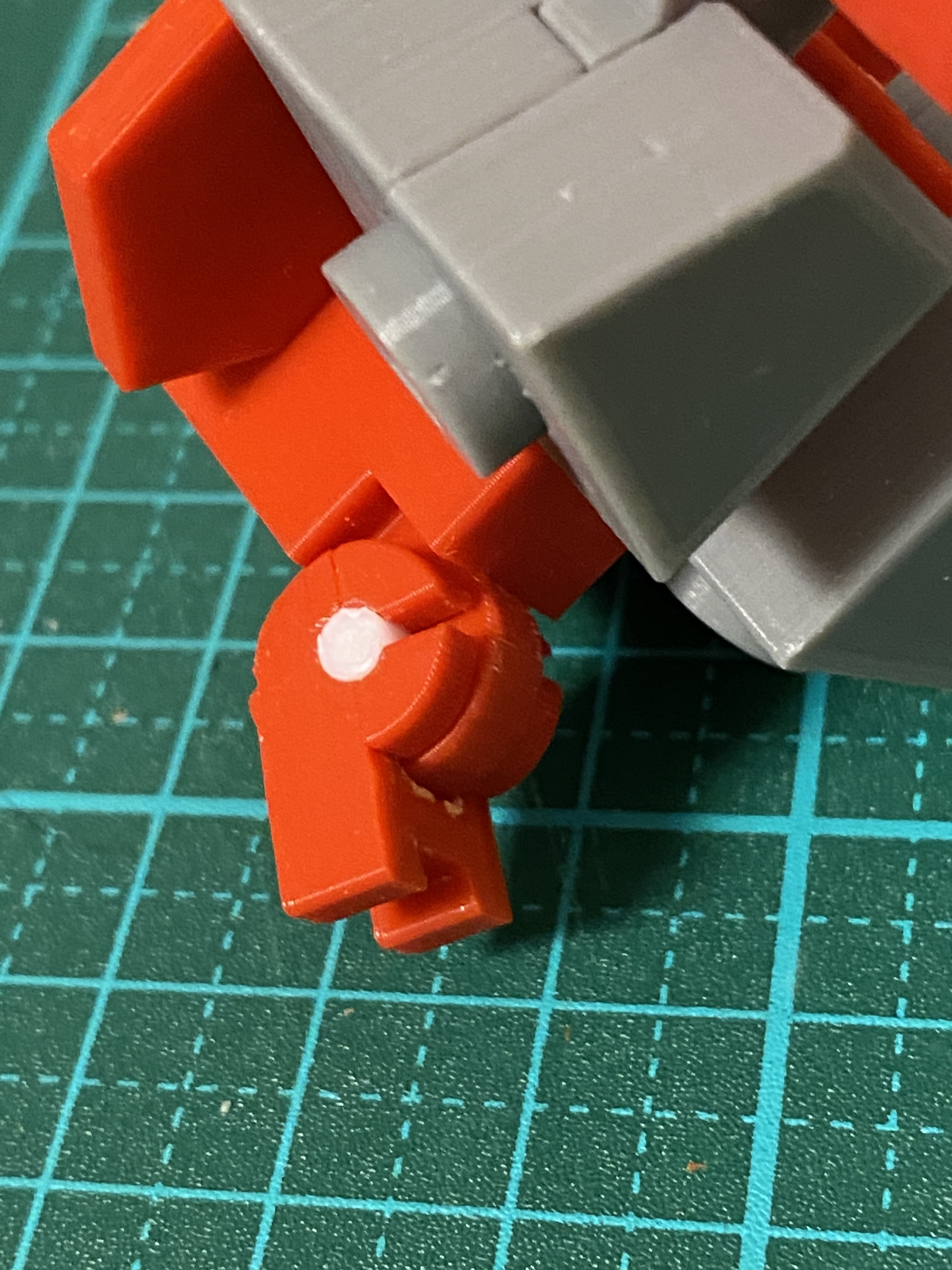
足との接続部分です。

リアスカートを接着します。


次はサイドスカートを組みます。
ヒンジを組みます。

ヒンジをサイドスカートに接着します。

サイドスカートを腰に接着します。


腰の前側を組みます。
軸でフロントスカートを接続します。


前後の腰パーツをヒンジで接続します。
股間のヒンジを組みます。

ヒンジに腰パーツを接着します。

折りたたむと腰になります。

変形時にグラグラしないように磁石をはめます。

おなかのパーツです。

柱になるパーツを接着します。












非常に組みづらかったですが何とかうまくできました。
このロボの変形で重要な部分が胴体に集中しています。
股間のヒンジの耐久力が心配ですが今のところ大丈夫そうです。

残るはハネだけです。
問題無ければ次回完成出来るでしょう。
今回はここまでです。
コメント
0 件のコメント :
コメントを投稿