3Dプリンターフル稼働、上半身完成!
今回は上半身を完成させます。


3Dプリンターさんにはフル稼働で働いていただき、頭が下がる思いです。ありがとうございます。

上半身パーツのプリント完了です。
頭部以外は失敗も無く、割と綺麗にプリント出来ました。フィラメントを無駄に消費せず助かりました。
ではサポートを取り、組み立てていきます。

胴体の基礎になるパーツに前回の頭と腕を接続します。
軸はいつもの3mmシリコンチューブです。

次は股関節のパーツを・・・と思ったら何か違和感が。
穴のサイズがでかすぎます。直径5mmのはずが8mmじゃないですか!やだもう。
作り直します。小さいパーツなので30分ぐらいでプリントできますが、こういうのが続くとメンタルがやられますね。
プリントしてる間に次に進みます。

サイドアーマーを接続します。

接合部がはさみ込みでは無いので、補強の為にシリコンチューブの中に直径2mmの針金を入れます。

左右同じように組みます。

胴体に接続します。
前回と同じくドリルでミスってユルユルになってしまいました。
しょうがないのでほっといて次に行きます。

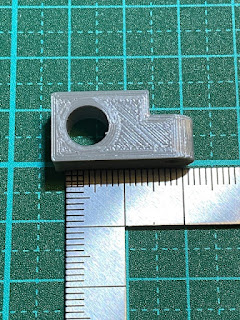
股関節のパーツが出来ました。左が正解、右が失敗です。

足との接合部になるので軸は太めに設定してます。
5mmのシリコンチューブをはめましたが、合体時に弱ければポリキャップに変えます。
胴体に接続します。
ここも軸に針金を入れました。今回サイズが大きいので、シリコンチューブだけではダメな所が結構ありますね。

胴体正面のパーツです。

フロントアーマーを接続します。

軸で回転して胴体に収まります。
後で気付くのですがこの機構はいりませんでした。
このパーツは元になったロボからデータをそのまま流用したので、今回は必要ない事に気付きませんでした。

そして気付かないまま接着していきます。

正面のパーツ完成です。
これを胴体に張り合わせます。

どうやらまたミスっていたようです。隙間が出来ました。
瞬間接着剤で張り合わせた後、モンキーレンチではさみましたがダメでした。
まあ可動に問題無いのでこのまま行きます。

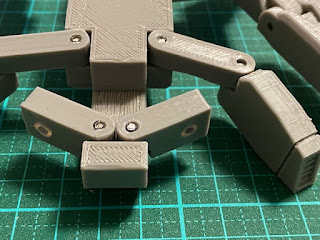
背部の羽を組みます。

位置合わせ用の凸凹にはめ込み、接着剤で固定します。
そしてまたミスります。

この真ん中の細いパーツを先に接続しないといけなかったのですが、両側の羽から付けてました。
接着剤が固まる前に気付き、ギリギリで羽を外せました。
プチパニックになり、その画像を撮るのを忘れてました。
とりあえず直せたのでよかったです。このパーツを再プリントするとなったら6時間以上かかりますから。
では次に進みます。

最後の工程です。胴体と羽を接続します。

背中の溝にはめ込み、軸を入れます。

磁石をはめ込みます。ロボ形態の時にプラプラしないように固定させます。

とういうことで上半身の完成です。
ミスが多かったものの、再プリントは最小限で済んでよかったです。

後ろです。リアアーマーは足メカの方に付いています。

この股間の隙間が気になります。余裕があるときに直します。多分。
最後に変形させてみます。

いい感じです。
が機首をもう少し尖らせた方が良かったですね。モデリング時に後で直そうとして忘れていたようです。まあこれも悪くないですよ。と思いたい。もう直せないし・・・
変形に問題は無しです。パーツ同士が引っかかったりして可動が制限されることも無く、うまくいきました。珍しいですよ、一発でOKなのは。
ちなみに、ここでフロントアーマー可動の意味のなさに気付きました。まあいいですよ。意味がないだけで問題もないですから。
変形プロセスは足が完成したときにまとめてお見せします。
長くなりましたが今回はここまでです。
コメント
0 件のコメント :
コメントを投稿