完成!合体型ロボ01、変形合体プロセス公開。
今回は完成させて変形合体させます。

前回のももを作り直しました。

右が前回ので、左が作り直したパーツです。短くしました。
モデリングの修正はこれで終わりにします。
後は残りのパーツをプリントして完成させます。

これらはプリントの失敗で廃棄するパーツ達です。
足のでかいパーツを2回失敗してるのが辛いです。
それでも今までに比べれば少ないです。うまくいった方です。
そしてすべてのプリントが終わり、もう片方の足も組みました。
これで完成です。後で作り直すと言っていた所は何一つ直してませんが、完成です。
ではご覧下さい。
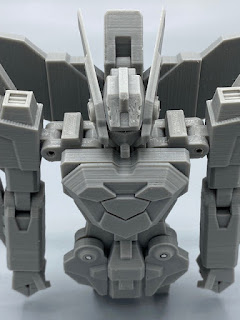
先ずは上半身になる1号機です。



では変形させます。
機首を上に持ち上げます。


背中に合わせます。磁石で固定されます。

ひっくり返します。

肩パーツを倒して腕を横に移動します。

頭を前方に移動させ、隙間にはめ込みます。
頭と腕はこれで完了です。

股間にあるサイドアーマーを横に開きます。

足との接続パーツを出します。見やすいようにフロントアーマーを収納してます。

両側行います。

これで上半身は完了です。
では次は2号機、3号機です。



片足になります。2号機、3号機は全く同じものです。
では変形させます。

最初につま先パーツを起こします。

軸で回転します。

立たせることができるようになります。

羽を変形させます。

小さい羽根をたたみます。

真ん中のパーツを押し込み、隙間を作ります。

羽を持ち上げ中央に寄せます。

羽を接続軸で回転させ、隙間に収納します。

これで羽は完了です。

機首を後ろに倒します。

胴体との接続軸が出てきます。機首はリアアーマーになります。

足の変形完了です。
同じようにもう一体も変形させます。
最後に3機を合体させます。

足の軸を接続パーツの穴に挿します。

両足接続して・・・

出来ました!
合体型ロボ01(リニューアルVer)の完成です!

横から。

後ろから。

上半身。

下半身。

あおりで。

肩が上がって、肘が曲がり、手首が回転します。
他は動きません。

ということで何とか完成させることが出来ました。
実は今回一番不安だったのが、フィラメントが足りるかどうかでした。
手元に在庫がなかったので、注文して取り寄せ待ちになるんじゃないかと。
最後の方はプリント失敗する度にひやひやしてましたが、何とかなりました。
長くなったので次回にしますが、元になったロボとの比較をしてみたいと思います。
では今回はここまでです。
コメント
0 件のコメント :
コメントを投稿